
开普勒三大定律的代数和三角证明
摘要 本文是关于开普勒第一定律, 即有界行星轨道是椭圆形的初等证明, 无需使用微积分. 这个证明在精神上与前人的推导类似, 运用守恒定律获得行星轨道的表达式, 然后将其与椭圆的方程进行比较. 然而, 我们从椭圆的两个众所周知的性质中, 使用三角学推导出匹配行星轨道的方程. 完全避免了微积分.
关键词 开普勒第一定律; 椭圆; 三角函数
一、导言
牛顿对行星轨道的解释是他的运动定律和万有引力定律的重大胜利之一. 在高中和大学的基础物理教科书中, 关于万有引力的章节总是描述开普勒的行星运动三定律, 但大多数教科书只推导出圆形轨道的结果. 避免微积分的证明是一种有价值的教学辅助工具, 对物理学学生和热衷的业余物理学家和天文学家都有吸引力. 其他人已经提供了一些基于微积分、几何或代数和三角学的初等推导. 如 E. Vogt (1996年); Noll(2002年); Goodstein 和 Goodstein(1996年); Provost 和 Bryant(2009年); Unruh(2018)然而, 文献中看到的分析推导往往会将动力学方程简化为学生或爱好者在课程中通常不会遇到的椭圆方程, 并且该方程描述椭圆的理由要么被视为标准的数学结果, 如 Noll(2002), 要么通过应用微积分推导出, 如 E.Vogt(1996).
在这项工作中, 我们采用了一个不寻常的椭圆方程来证明该定律. 我们运用三角函数从两个众所周知的特质来推导这个方程. 然后, 这个方程很容易与通过将守恒定律应用于物理问题而导出的方程相匹配, 表明轨道是椭圆形的. 因此, 我们相信, 我们在这项工作中得出结果的假设应该是高中生或爱好者相对容易接受的.
二、能量守恒和角动量守恒
守恒定律在描述系统的动力学中起着重要的作用, 它为我们提供了运动常数. 事实上, 如果能够确定足够数量的独立运动常数, 就可以完整地描述系统的动力学.
在开普勒问题中有三个守恒量, 但我们在这里只关心其中的两个, 能量和角动量.
为了简化开普勒问题, 我们假设其中一个天体(“太阳”)的质量 $M$ 远远大于另一个天体(“行星”)的质量 $m$, 以至于可以将其视为在空间中静止不动 (注: 如果需要, 可以使用相对坐标和约化质量的公式来克服这种近似). 将 $M$ 放在原点, 让我们用向量 $\vec{r}$ 表示运动天体 $m$ 的位置, 用向量 $\vec{v}$ 表示其速度. 设 $\phi$ 为从 $\vec{r}$ 逆时针转向 $\vec{v}$ 的角度. 如下图 FIG.1
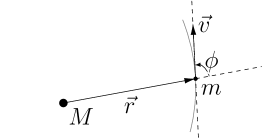
一个表示所考虑的物理系统的图形. 物体 $m$ 环绕另一个物体 $M \gg m$ 运动. 原点与 $M$ 的位置重合, $M$ 被近似认为静止的. $m$ 的速度用向量 $\vec{v}$ 表示, 其位置用向量 $\vec{r}$ 表示. 向量 $\vec{v}$ 作为 $m$ 轨迹的切线, 与向量 $\vec{r}$ 形成一个角度 $\phi$.
然后我们可以把物体的角动量写成
$$ \label{eq:AngularMomentum} \vec{L} = m \vec{r} \times \vec{v} = m r v \sin \phi \hat{z},\tag{1} $$
其中, $r$ 和 $v$ 分别表示 $\vec{r}$ 和 $\vec{v}$ 的模大小, 并且 $\hat{z}$ 是在垂直于 $\vec{r}$ 和 $\vec{v}$ 的方向上的单位矢量. 由于作用在物体 $m$ 上的重力沿着连接物体的线作用, 所以没有扭矩施加在物体上, 从而角动量 $\vec{L}$ 在大小 $L$ 和方向 $\hat{z}$ 上都守恒. 方向的恒定性告诉我们, 轨迹必须位于垂直于 $\hat{z}$ 的平面内.
由于没有非保守力作用在物体 $m$ 上, 系统的能量 $E$ 也是运动常数. 它由动能和重力势能的总和给出,
$$ E = \frac{1}{2} m v^2 - \frac{G M m}{r}, \label{eq:energy}\tag{2} $$
其中 $G$ 是万有引力常数. 请注意, 我们遵循的约定是在势能平面无穷远时引力势能为 $0$, 这样一来, 有界轨道的总能量 $E$ 将是负的(因为这样的物体没有足够的能量到达无穷远). 我们在这里的处理仅限于有界轨道的情况.
三、由守恒定律导出的轨道方程
对 $v$ 求解方程 $\eqref{eq:energy}$, 可以得到
$$ \label{eq:Velocity} v = \sqrt{\frac{2E}{m} + \frac{2GM}{r}}. \tag{3} $$
代入方程 $\eqref{eq:AngularMomentum}$, 可以得到
$$ \label{eq:PreTrajectory} L = m \sin \phi \sqrt{\frac{2Er^2}{m} + 2 G M r}, \tag{4} $$
整理可得
$$ \begin{equation} \label{eq:Trajectory} \left ( r^2 + \frac{GMm}{E} \, r \right ) \sin^2 \phi = \frac{L^2}{2mE}. \tag{5} \end{equation} $$
上述方程告诉我们, 位置向量和速度向量之间的夹角 $\phi$ 如何随着距离 $r$ 变化. 注意到速度向量是轨迹的切线, 我们将 $\phi$ 定义为行星位置向量的切线所成的角度. 因此, 原则上, 方程 $\eqref{eq:Trajectory}$ 描述了行星所处的轨道. 然而, 它使用的是不常见的变量, 因此不能立即与已知的椭圆标准方程相匹配.
注释内容(非正文部分)
我们现在注意到方程 $\eqref{eq:Trajectory}$ 告诉我们, 行星与太阳之间存在一个最小距离 $r_p$(称为近日点距离). 我们可以通过以下方式得出这个结论: 我们重新排列方程如下:
$$ \begin{equation} \label{eq:TrajectoryRearranged} E r^2 + GMmr = \frac{L^2}{2m \sin^2 \phi}, \end{equation} $$
并且注意到如果 $r > 0$ 变得足够小, 方程的左边会变得足够小, 以至于我们最终会得到一个荒谬的要求, 即 $\sin^2 \phi > 1$. 这个结论不受 $E \lesseqqgtr 0$ 的影响, 因为对于足够小的 $r$, $E r^2$ 项小于 $GMmr$ 项. 我们同样注意到, 当 $E < 0$ 时, $r$ 也有一个上限(远日点距离), 因为如果 $r$ 变得非常大, $E r^2$ 项会变得足够负, 以至于左边也会变得负的, 最终得到另一个荒谬的要求, 即 $\sin^2 \phi < 0$. 从这个方程推导出近日点和远日点距离的过程被放在附录中.
由于上述对曲线的描述相当不寻常, 我们详细阐述一下如何根据上述方程绘制轨迹: (注: 请注意, 这种方法在实践中并不是一个好方法, 因为由于有限步长 $\varepsilon$ 引起的误差会累积. 只有在 $\varepsilon \to 0$ 的极限情况下, 这种方法才能得到正确的轨迹)
- 在纸上标记一个点, 并将其称为 $F$. 这将标记太阳的位置.
- 选择任意一个起始点 $P_0$, 它距离 $F$ 的距离为 $r_0$, 在前一段讨论的允许范围内选择任意一个 $r_0$ 的值; 为了画图的简便, 让我们从一个距离最短的允许点开始, 即近日点距离 $r_p$, 位于 $F$ 的右侧. 让我们称这个点为 $P_0$. 标记这个点.
- 通过在方程 $\eqref{eq:Trajectory}$ 中代入 $r = r_0$ 来计算角度 $\phi$. 方程无法唯一确定角度 $\phi$, 因此选择 $0^\circ$ 到 $90^\circ$ 之间的解, 从轨迹的上半部分开始.
- 从太阳位置 $F$ 画一条线穿过点 $P_0$, 在 $P_0$ 处逆时针测量角度 $\phi$, 并在所得到的方向上画一条微小的线段(长度 $\varepsilon$), 以得到下一个点 $P_1$.
- 现在测量点 $P_1$ 到 $F$ 的距离 $r_1$.
- 通过将 $r_1$ 代入方程 $\eqref{eq:Trajectory}$ 来得到 $\phi_1$ 和点 $P_2$, 然后继续重复这个过程, 逐步描绘出整个轨迹.
熟悉微积分的读者会识别出上述过程实际上就是数值积分. 实际上, 方程 $\eqref{eq:Trajectory}$ 是轨迹的一阶微分方程, 因为它(宽泛地说)根据给定点处切线的斜率来指定曲线. 因此, 如果不直接使用微积分, 或者以有限差分的一阶近似的形式, 提供一个直接推导来证明轨迹是椭圆、双曲线或抛物线将是具有挑战性的, 如果不是不可能的话. 这项工作反而采取了分别推导出椭圆方程并将其与方程 $\eqref{eq:Trajectory}$ 匹配的方法, 我们将在下一节完成这项任务. 导数关系也许是我们推导椭圆方程时假设两个性质而不是一个的原因——这两个性质结合起来提供了切线斜率与曲线上位置之间的关系. 因此, 结果在代数操作上更为简洁, 视觉上也更直观.
四、用切线描述椭圆的方程
在本节中, 我们将推导出一个不寻常的椭圆方程, 当与方程 $\eqref{eq:Trajectory}$ 匹配时, 将立即导出开普勒的第一定律. 让我们用 $a$ 表示椭圆的半长轴, 用 $e$ 表示其偏心率. 偏心率 $e$ 的一个定义是, 焦点位于椭圆中心的两侧, 距离为 $ae$. 由于焦点位于椭圆内部, 所以 $0 \leq e < 1$, 当 $e = 0$ 时, 对应的是焦点重合的情况, 即圆形.
考虑 FIG.2, 其中我们用 $F'$ 和 $F$ 表示椭圆的两个焦点. 我们首先明确椭圆的两个重要性质.
给定椭圆上的任意一点 $P$, 长度 $|PF'|$ 和 $|PF|$ 的和是常数, 且等于 $2a$.
如果一个镜子做成了椭圆的形状(在椭圆平面的垂直方向上有一小部分延伸), 从焦点 $F$ 发出的一束光线, 击中椭圆上的任意一点 $P$ 后, 会反射到另一个焦点 $F'$, 反之亦然. 数学上, 这意味着椭圆在点 $P$ 处的法线平分角度 $FPF'$, 因为入射角和反射角(从法线测量)必须相等.
注: 这两个性质不是相互独立的. 第二个性质可以通过第一个性质推导出来, 例如, 通过使用费马原理. 然而, 同时使用这两个性质可以让我们简化代数运算并避免使用微积分.
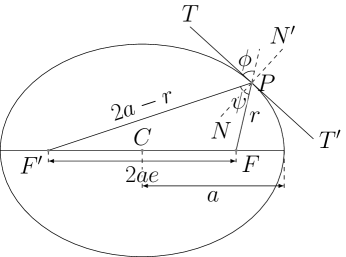
图示 FIG.2 与方程 $\eqref{eq:PedalEquation}$ 的推导相关, 这是对椭圆的一个非传统描述, 关联了 $r$ 和 $\phi$. 点 $C$ 是椭圆的中心, $F'$ 和 $F$ 是焦点. 椭圆的半长轴为 $a$, 偏心率为 $e$. 焦点之间的距离是 $2ae$, 而从焦点到椭圆上任意一点 $P$ 的距离之和是 $2a$.
现在我们准备推导我们寻求的方程. 在 FIG.2 中, 椭圆在点 $P$ 处的切线被表示为线段 $TT'$, 法线被表示为线段 $NN'$. 让我们用 $\phi$ 表示线段 $FP$ 与切线 $T'T$ 之间的角度. 由于到每个焦点的距离是 $ae$, 线段 $F'F$ 的长度是 $2ae$. 让我们用 $r$ 表示长度 $|PF|$. (注: 我们在本节中重新使用符号 $\phi$ 和 $r$ 是有意的: 我们稍后将看到这些确实对应于前一节中的相应符号. )
那么根据性质 (1), $|PF'| + |PF| = 2a$, 或者 $|PF'| = 2a - r$. 由于 $TT'$ 和 $NN'$ 垂直, $\angle NPF$ 是 $90^\circ - \phi$. 使用性质 (2), 我们有 $\psi = 2(90^\circ - \phi) = 180^\circ - 2\phi$. 通过将余弦定理应用于三角形 $F'PF$, 我们得到 $$ \begin{equation} \label{eq:CosineRule} (2ae)^2 = (2a - r)^2 + r^2 - 2r(2a - r) \cos(180^\circ - 2\phi). \tag{6} \end{equation} $$ 使用三角恒等式 $\cos(180^\circ - \theta) = -\cos\theta$ 和 $\cos 2\theta = 1 - 2\sin^2 \theta$, 并对结果进行简化, 我们得到 $$ \begin{equation} \label{eq:PedalEquation} \begin{aligned} % (2ae)^2 =& (2a - r)^2 + r^2 + 2r(2a - r) (1 - 2\sin^2 \phi)\\ % =& (2a)^2 + 4ar + r^2 + r^2 + 2r(2a - r) - 4r(2a - r)\sin^2 \phi\\ % =& (2a)^2 + (2ar - r^2) \sin^2 \phi\\ % a^2 (1 - e^2) =& (2ar - r^2) \sin^2 \phi. (r^2 - 2ar) \sin^2 \phi = -a^2 (1 - e^2). \end{aligned} \tag{7} \end{equation} $$ 上述关联 $r$ 和 $\phi$ 的方程描述了一个半长轴 $a > 0$ 且偏心率 $0 < e < 1$ 的椭圆. (注: 在方程 $\eqref{eq:PedalEquation}$ 中代入 $\sin \phi = p / r$ 会得到椭圆的*切点方程*, 但我们更倾向于保持当前的形式以便于几何直觉的理解. ) 如果我们代入 $e = 0$, 它也描述了一个圆. 但这一点不太容易看出来: 注意到表达式 $2ar - r^2$ 和 $\sin^2 \phi$ 的最大值分别是 $a^2$ 和 1, 我们可以看到右边只能通过 $r = a$ 和 $\sin \phi = \pm 1$ 来达到等于 $-a^2$ 的值, 这确实描述了一个圆.
五、开普勒第一定律: 椭圆轨道, 当 $E < 0$
现在我们将第三节的物理结果与第四节的数学结果联系起来. 让我们将 FIG.2 中的点 $P$ 和 $F$ 分别与某一时刻天体 $m$ 的位置和天体 $M$ 的位置等同起来. 然后我们可以将方程 $\eqref{eq:Trajectory}$ 中的 $r$ 和 $\phi$ 与 FIG.2 中的相应符号对应起来. 如果我们现在比较方程 $\eqref{eq:Trajectory}$ 和方程 $\eqref{eq:PedalEquation}$, 我们会发现如果它们确实是相同的, 那么 $$ \begin{equation} \label{eq:Identifications} \begin{aligned} a \;=&\; -\frac{GMm}{2E},\\ e \;=&\; \sqrt{1 + \frac{2EL^2}{(GM)^2 m^3}}. \end{aligned} \tag{8} \end{equation} $$ 因此, 我们已经证明了当 $E < 0$ 时, 天体 $m$(“行星”)的轨迹是一个椭圆, 天体 $M$(“太阳”)位于椭圆的一个焦点上, 其半长轴 $a$ 和偏心率 $e$ 是通过方程$\eqref{eq:Identifications}$ 由物理参数和运动常数确定的. 半长轴 $a$ 和偏心率 $e$ 的值与教科书中推导出的结果一致. 给定初始条件, 我们可以计算角动量 $\vec{L}$ 和能量 $E$, 从而确定椭圆的形状和方向.
如果 $E > 0$ 或 $E = 0$, 我们无法在满足约束条件 $a > 0$ 和 $0 \leq e < 1$ 的情况下, 将方程 $\eqref{eq:Trajectory}$ 的形式与方程 $\eqref{eq:PedalEquation}$ 匹配. 因此, 在这些情况下, 轨迹不是椭圆. 对于 $E > 0$ 和 $E = 0$ 的情况, 同样可以推导出类似于方程 $\eqref{eq:PedalEquation}$ 的方程, 分别对应于双曲线和抛物线, 我们可以将方程 $\eqref{eq:Trajectory}$ 和方程 $\eqref{eq:PreTrajectory}$ 与它们匹配.
六、开普勒第二定律: 相等时间内扫过相同面积(注释部分)
这个定律的基本推导是众所周知的, 并且在大多数基础物理教科书中都会介绍一般轨道(不仅仅是圆形轨道). 我们在这里为了完整性和它在获得第三定律方面的有用性而呈现它.
在某个瞬间, 让天体 $m$ 位于其轨迹上的一个位置 $\vec{r}$. 在一小段时间 $\mathrm{d}t$ 内, 天体沿着一个微小的椭圆形弧移动到位置 $\vec{r'}$, 在原点($F'$)处形成一个角度 $\mathrm{d}\theta$. 通过将这个弧近似为圆弧, 我们可以将这样定义的圆形扇形的面积写为 $\mathrm{d}A = \frac{1}{2} r^2 \mathrm{d}\theta$, 在其中我们忽略了 $\vec{r}$ 和 $\vec{r'}$ 之间大小的变化.
从角动量的表达式 $\eqref{eq:AngularMomentum}$, 我们认识到 $v \sin \phi$ 是 $\vec{v}$ 垂直于 $\vec{r}$ 的分量的大小, 它描述了方向变化的速率, 即, $$ \begin{equation*} v \sin \phi = r \:\frac{\mathrm{d}\theta}{\mathrm{d}t}. \end{equation*} $$ 因此, 我们注意到 $$ \begin{equation} \label{eq:SecondLaw} \begin{aligned} \frac{\mathrm{d}A}{\mathrm{d}t} =& \frac{1}{2} r^2 \frac{\mathrm{d}\theta}{\mathrm{d}t}\\ =& r v \sin \phi\\ =& \frac{L}{m}. \end{aligned} \end{equation} $$ 由于 $L/m$ 是常数, 我们有 ${\mathrm{d}A}/{\mathrm{d}t}$ 是常数, 因此位置向量在相等的时间间隔内扫过相等的面积.
七、开普勒第三定律: 轨道周期与半长轴的关系(注释部分)
半短轴 $b$ 通过表达式与 $a$ 和 $e$ 相关: $$ \begin{equation} \label{eq:Eccentricity} b^2 = a^2 (1 - e^2). \tag{9} \end{equation} $$ 我们现在可以从上述结果推导出轨道周期. 由于位置向量在单位时间间隔内扫过的面积由 $L/m$ 给出, 因此扫过单位面积所需的时间由 $m/L$ 给出. 由于轨道周期 $T$ 是扫过椭圆整个面积 $\pi a b$ 所需的时间, 我们有 $$ \begin{equation*} T = (m / L) \pi a b. \end{equation*} $$ 代入方程 $\eqref{eq:AngularMomentum}$ 中 $L$ 的表达式, 并通过方程 $\eqref{eq:Eccentricity}$ 消去 $b$, 以及通过方程组 $\eqref{eq:Identifications}$ 中的第一个方程消去 $E$, 我们得到 $$ \begin{equation} T = \frac{2\pi\,a^{3/2}}{\sqrt{GM}}, \end{equation} $$ 这就得到了开普勒第三定律.
附录(注释部分)
在本附录中, 我们从方程 $\eqref{eq:Trajectory}$ 确定了近日点和远日点(或者更一般地说, 近地点和远地点)的距离.
在 $r = |\vec{r}|$ 达到最大值和最小值的瞬间, 速度向量 $\vec{v}$ 必须与 $\vec{r}$ 垂直. 这是因为如果 $\vec{v}$ 有任何与 $\vec{r}$ 平行或反平行的分量, 那么在那个瞬间之前或之后, 天体 $m$ 会更接近或更远离开天体 $M$, 因此它不会对应于一个最大值或最小值. 因此, $r$ 的最大值和最小值对应于 $\phi = \pm 90^\circ$ 的点, 即 $\sin^2 \phi = 1$. 将这个代入方程 $\eqref{eq:Trajectory}$ 得到一个二次方程. $$ \begin{equation} \label{eq:PeriapsisApapsisQuadratic} r^2 + \frac{GMm}{E}r - \frac{L^2}{2mE} = 0 \tag{Ap.1} \end{equation} $$ $r$ 的最大值或最小值必须满足, 它有解 $$ \begin{equation} \label{eq:PeriapsisApapsis} r = \frac{-\frac{GMm}{E} \pm \sqrt{\left ( \frac{GMm}{E} \right )^2 + 2 \frac{L^2}{m E}}}{2}. \tag{Ap.2} \end{equation} $$ 当 $E > 0$ 时, 很明显两个解都是实数, 但只有其中一个解(对应于 $+$ 符号)是正数, 那个才是唯一有效的极值. 当 $E = 0$ 时, 除以 $E$ 将是无效的, 因此我们必须首先将方程 $\eqref{eq:PeriapsisApapsisQuadratic}$ 乘以 $E$, 然后将 $E = 0$. 得到的极值是 $r_p = \frac{L^2}{2GMm^2}\; (E = 0)$. 我们通过以下论证推断, 在这两种情况下, 解对应于近日点而不是远日点: 由于天体 $m$ 必须与质量 $M$ 保持非零的最小距离(以保持非零的角动量 $L$), 必须存在一个最小值. 最大值不必存在, 因为在这些情况下, 质量 $m$ 有足够的能量逃脱 $M$ 的引力牵引并逃逸到无穷远, 正如第二节所述.
当 $E < 0$ 时, 我们已经论证了必须存在一个最小值和一个最大值. 这表明方程 $\eqref{eq:PeriapsisApapsis}$ 中的两个根都应该是实数, 即二次方程的判别式必须为正. 由于 $E < 0$, 平方根下的第二项是负数, 所以开方数小于 $-\frac{GMm}{E}$. 因此, 两个根确实是正数, 其中较小的一个($-$ 符号)对应于近日点, 较大的一个($+$ 符号)对应于远日点.
致谢
作者希望感谢班加罗尔天文学会的业余天文学家进行了有益的讨论和反馈.
原文来源
[arXiv:2111.08447]An algebra and trigonometry -based proof of Kepler's First Law
译者的话
本文有关开普勒三大定律的推导过程极其有趣, 并且几乎不使用高等数学过程, 非常推荐学习. 同时原文的 $\LaTeX$ 排版极其美观, 注释内容机器明确, 正文内容简短有力, 展现出精华部分, 非常值得大家借鉴.

 鄂公网安备 42010202000505 号
鄂公网安备 42010202000505 号